本文來源:三菱電機自動化中國微信公眾號
功能概要
此功能是連接機器人和CNC�,直接從CNC操作機器人,在CNC屏幕上顯示機器人狀態(tài)的畫面�。在CNC加工程序中���,可以通過機器人的G代碼命令進行自動操作,也可通過CNC的手動手柄進行機器人的手動操作����,以及機器人手動開關的數(shù)字I/O控制。
實例:工件加工
裝載/卸載動作
第1系統(tǒng):系統(tǒng)軸
第2系統(tǒng):僅控制機器人�,無系統(tǒng)軸

1�、機器人直接控制連接設定
硬件連接

參數(shù)設定

通訊檢查

2���、機器人直接控制設定
移動速度設置
機器人的工作速度取決于機器人的連接速度�����。CNC可以設定機器人的移動速度���。移動速率的設置由機器人設定速度(R20465)和機器人速度命令(僅機器人命令RF和自動操作模式)設置。

移動方式(JOG模式)

機器人在程序里的應用
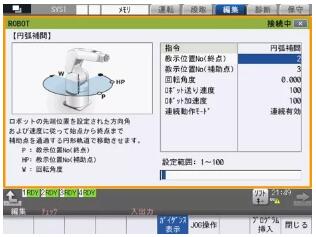
方法1:示教點在NC上操作
移動到設為示教點的位置�����,利用編輯畫面中的示教點設置���。設置成功后會在程序里顯示P1 設置第二點則顯示為P2����。
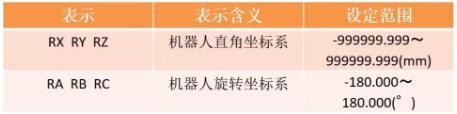
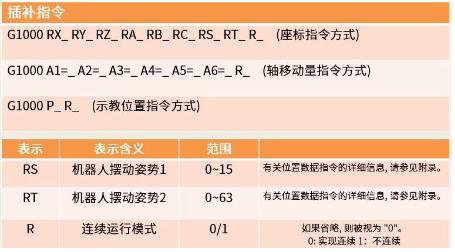
方法2:輸入機器人的坐標
RX_ RY_ RZ_ RA_ RB_ RC_(軸坐標)
A1=_ A2=_ A3=_ A4=_ A5=_ A6=_(移動量)
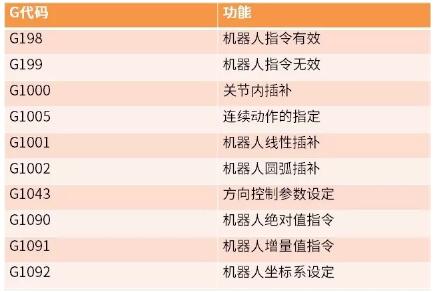
加工時需要用到的G代碼如下:
其他程序應用:
3�、顯示及適用
界面介紹

適用機型

4、注意事項
(1)參數(shù)#11901機器人啟用裝置��,設備狀態(tài)處于ON狀態(tài)時�,即使按下軸移動按鈕���,機器人也不移動����。
(2)當按下與機器人的軸運動有關的按鈕(如,軸移動按鈕或手關閉按鈕)時�,所述菜單的反轉被解除并關閉機器人�。
(3)不能通過軸移動按鈕來選擇由機器人操作的軸移動菜單。
(4)不能同時按下諸如軸移動或手開關的兩個或多個按鈕來操作機器人�����。
(5)根據(jù)通信狀態(tài)��,可能需要很長的時間才能使機器人停止��。如果要立即停止機器人操作的話�,請按緊停來停止機器人�����。
(6)機器人控制器連接狀態(tài)未連接的情況�,不能示教。如果你在未連接狀態(tài)下選擇菜單(示教)��,它會顯示操作信息“機器人控制器未連接”。